This is an old revision of the document!
Current and Past Projects
Software Engineering and Design Approaches
SwarmMesh: A Distributed Data Structure for Cooperative Multi-Robot Applications
Nathalie Majcherczyk, Carlo Pinciroli. SwarmMesh: A Distributed Data Structure for Cooperative Multi-Robot Applications. 2020 IEEE International Conference on Robotics Automation (ICRA 2020). In press.
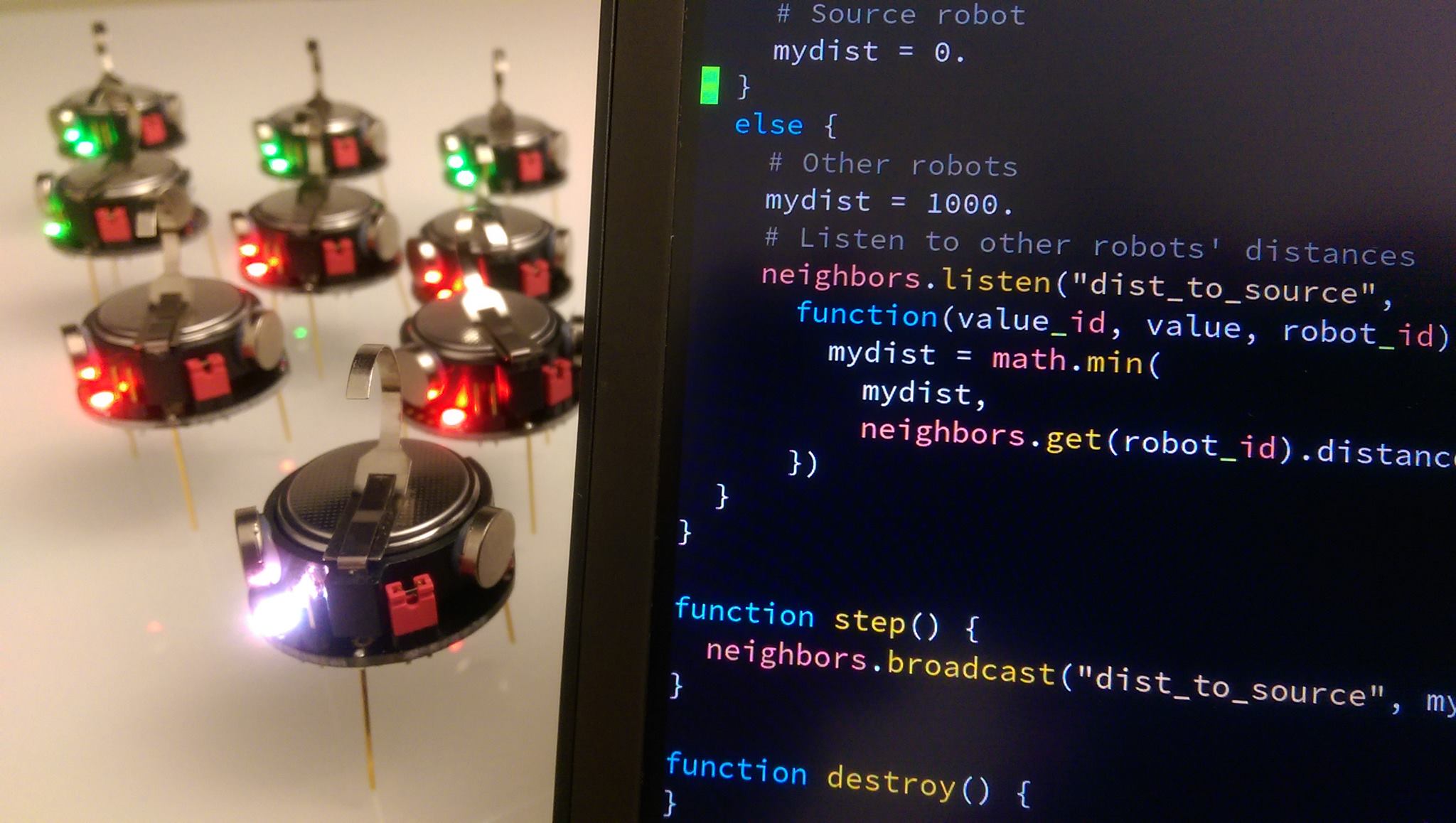
Buzz: A Programming Language for Robot Swarms
- Carlo Pinciroli and Giovanni Beltrame. Buzz: A Programming Language for Robot Swarms. IEEE Software, volume 33, number 4, pages 97-100. IEEE Press. 2016.
- Carlo Pinciroli, Giovanni Beltrame. Buzz: An Extensible Programming Language for Heterogeneous Swarm Robotics. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2016), pages 3794-3800. IEEE Press.

Engineering Safety in Swarm Robotics
Giovanni Beltrame, Ettore Merlo, Jacopo Panerati, Carlo Pinciroli. Engineering Safety in Swarm Robotics. 1st International Workshop on Robotics Software Engineering (RoSE 2018). IEEE Press.

Swarm-Oriented Programming of Distributed Robot Networks
Carlo Pinciroli, Giovanni Beltrame. Swarm-Oriented Programming of Distributed Robot Networks. IEEE Computer, volume 49, number 12, pages 32-41. IEEE Press. 2016.
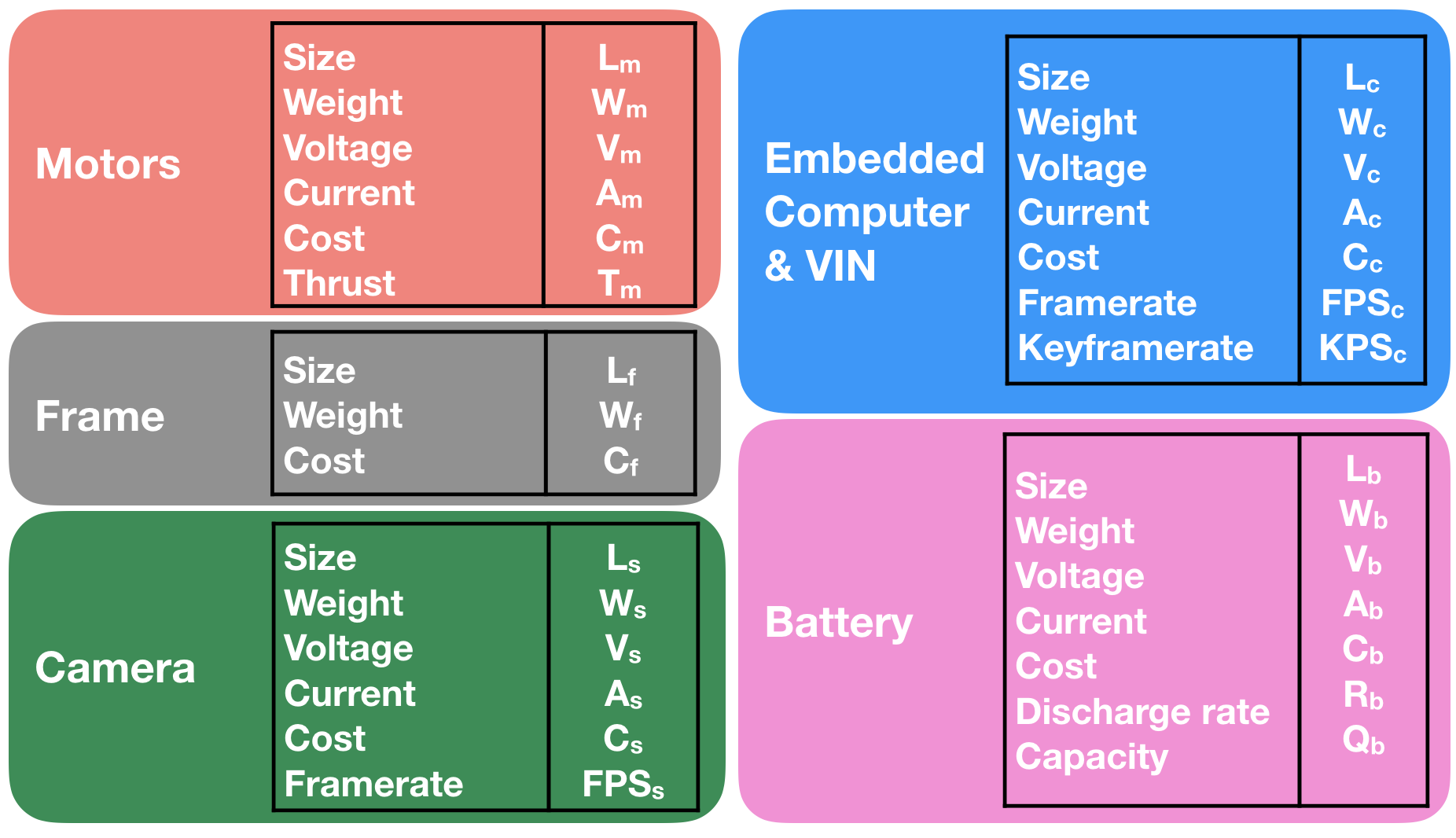
General Robot Co-design: Beyond the Monotone Case
Luca Carlone, Carlo Pinciroli. General Robot Co-design: Beyond the Monotone Case. International Conference on Robotics Automation (ICRA 2019). IEEE Press.
Machine Learning for Multi-Robot Systems
Distributed Data Storage and Fusion for Collective Perception in Resource-Limited Mobile Robot Swarms
Nathalie Majcherczyk, Daniel Jeswin Nallathambi, Tim Antonelli, Carlo Pinciroli. Distributed Data Storage and Fusion for Collective Perception in Resource-Limited Mobile Robot Swarms. IEEE Robotics and Automation Letters (RA-L). IEEE press.
Flow-FL: Data-Driven Federated Learning for Spatio-Temporal Predictions in Multi-Robot Systems
Nathalie Majcherczyk, Nishan Srishankar, Carlo Pinciroli. Flow-FL: Data-Driven Federated Learning for Spatio-Temporal Predictions in Multi-Robot Systems. International Conference on Robotics Automation (ICRA 2021). IEEE press.
Human-Swarm Interaction
Improving Human Performance Using Mixed Granularity of Control in Multi-Human Multi-Robot Interaction
Jayam Patel, Carlo Pinciroli. Improving Human Performance Using Mixed Granularity of Control in Multi-Human Multi-Robot Interaction. IEEE International Conference on Robot and Human Interactive Communication (Ro-Man 2020). IEEE press.
Mixed-Granularity Human-Swarm Interaction
Jayam Patel, Xu Yicong, Carlo Pinciroli. Mixed-Granularity Human-Swarm Interaction. 2019 IEEE International Conference on Robotics Automation (ICRA 2019). IEEE press.
Multi-Robot Coordination
SMAC: Symbiotic Multi-Agent Construction
Caleb Wagner, Neel Dhanaraj, Trevor Rizzo, Josue Contreras, Hannan Liang, Gregory Lewin, Carlo Pinciroli. SMAC: Symbiotic Multi-Agent Construction. IEEE Robotics and Automation Letters with ICRA2021 option. IEEE press.
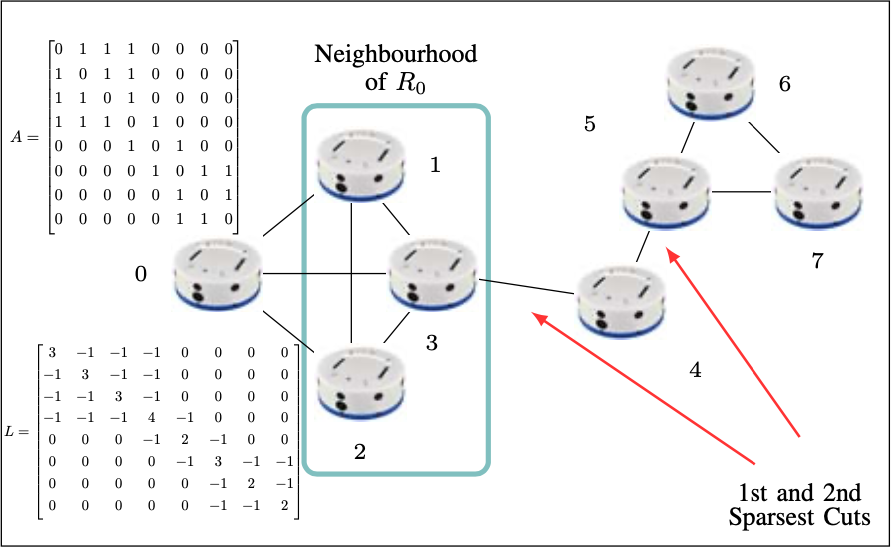
Decentralized Connectivity-Preserving Deployment of Large-Scale Robot Swarms
Nathalie Majcherczyk, Adhavan Jayabalan, Giovanni Beltrame, Carlo Pinciroli. Decentralized Connectivity-Preserving Deployment of Large-Scale Robot Swarms. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2018). IEEE press.
From Swarms to Stars: Task Coverage in Robot Swarms with Connectivity Constraints
Jacopo Panerati, Luca Gianoli, Carlo Pinciroli, Abdo Shabah, Gabriela Nicolescu, Giovanni Beltrame. From Swarms to Stars: Task Coverage in Robot Swarms with Connectivity Constraints. 2018 IEEE International Conference on Robotics and Automation (ICRA 2018). IEEE press.
Decentralized Progressive Shape Formation with Robot Swarms
- Guannan Li, David St-Onge, Carlo Pinciroli, Andrea Gasparri, Emanuele Garone, Giovanni Beltrame. Decentralized Progressive Shape Formation with Robot Swarms. Autonomous Robots, volume 42, number 8, pages 1-17. Springer. 2017.
- Carlo Pinciroli, Andrea Gasparri, Emanuele Garone, Giovanni Beltrame. Decentralized Progressive Shape Formation with Robot Swarms. 13th International Symposium on Distributed Autonomous Robotic Systems 2016 (DARS 2016), pages 433-445. Springer.
Minimalistic Computation
A Minimalistic Approach to Segregation in Robot Swarms
Peter Mitrano, Jordan Burklund, Michael Giancola, Carlo Pinciroli. A Minimalistic Approach to Segregation in Robot Swarms 2nd International Symposium on Multi-Robot and Multi-Agent Systems (MRS 2019). Springer.
Circle Formation with Computation-Free Robots Shows Emergent Behavioral Structure
David St-Onge, Carlo Pinciroli, Giovanni Beltrame. Circle Formation with Computation-Free Robots Shows Emergent Behavioral Structure. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2018). IEEE press.
Consensus and Decision-Making
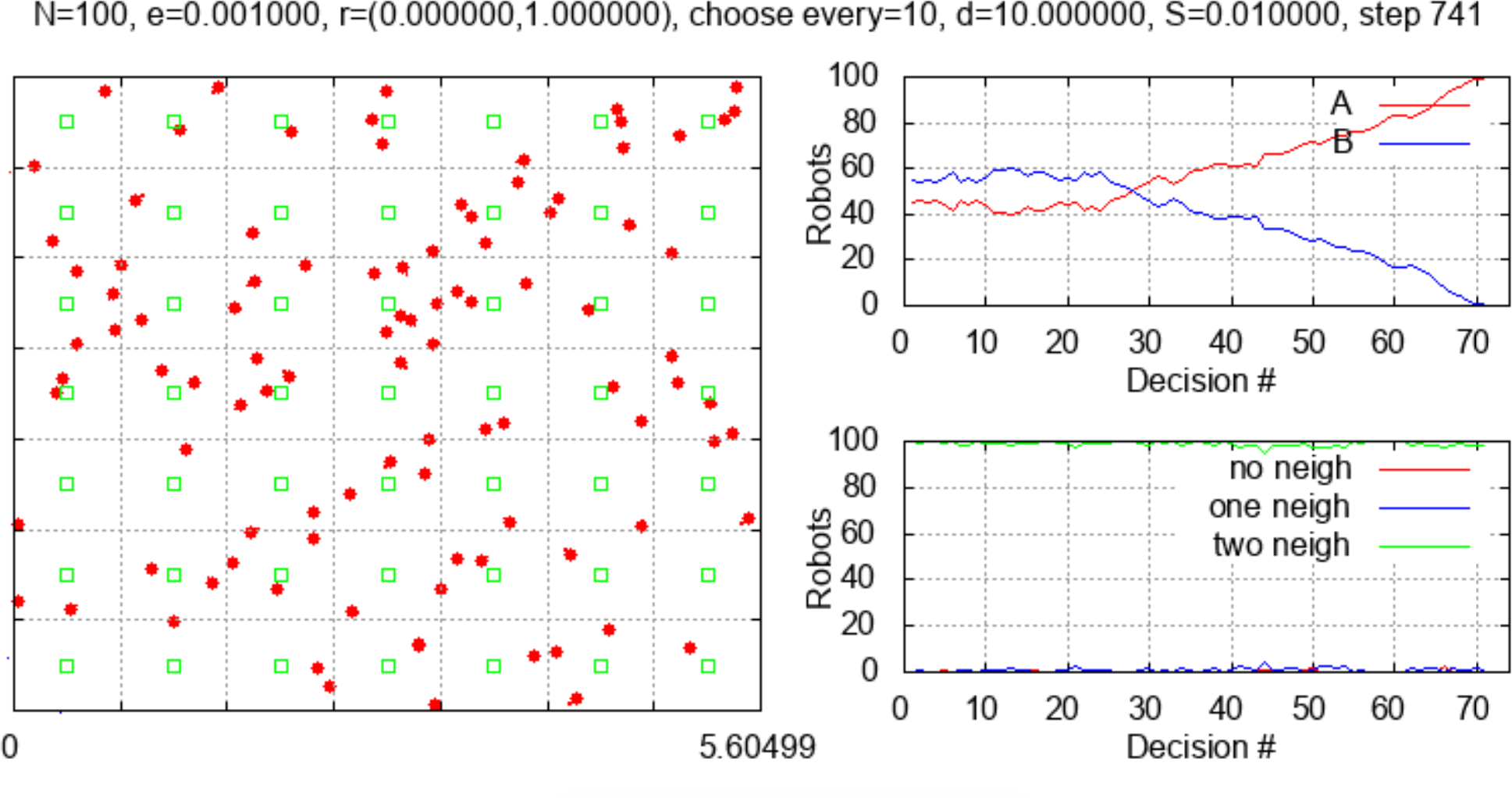
The Impact of Agent Density on Scalability in Collective Systems: Noise-Induced vs Majority-Based Bistability
Yara Khaluf, Carlo Pinciroli, Gabriele Valentini, Heiko Hamann. The Impact of Agent Density on Scalability in Collective Systems: Noise-Induced vs Majority-Based Bistability. Swarm Intelligence, volume 11, pages 155-179. Springer. 2016.
Simulation
Simulating Kilobots within ARGoS: Models and Experimental Validation
Carlo Pinciroli, Mohamed Salaheddine Talamali, Andreagiovanni Reina, James A. R. Marshall, Vito Trianni. Simulating Kilobots within ARGoS: Models and Experimental Validation. 11th International Conference on Swarm Intelligence (ANTS 2018). Springer.
Simulating Multi-Robot Construction in ARGoS
Michael Allwright, Carlo Pinciroli, Navneet Bhalla, Marco Dorigo. Simulating Multi-Robot Construction in ARGoS. 11th International Conference on Swarm Intelligence (ANTS 2018). Springer.
Teaching
A Gamification Concept for Teaching Swarm Robotics
Heiko Hamann, Carlo Pinciroli, Sebastian von Mammen. A Gamification Concept for Teaching Swarm Robotics. 12th European Workshop on Microelectronics Education (EWME 2018). IEEE press.
Undergraduate WPI Major Qualifying Projects (Selected)
Oddisy Drone Dispatch System
Students: Noah Hillman, Nick Sorensen, Marek Travnikar, Steven Viola
Advisors: Nick Bertozzi, Reinhold Ludwig, Brad Miller, Carlo Pinciroli
3D Swarm Construction
Students: Cameron Collins, Josue Contreras, Neel Dhanaraj, Hannan Liang, Trevor Rizzo, Caleb Wagner
Advisors: Carlo Pinciroli, Gregory Lewin, Raghvendra Cowlagi, Xinming Huang
Potential Projects
Task Allocation and Vehicle Routing

Decentralized Heuristics for Task Allocation and Routing in Multi-Robot Systems
Abstract: For a team of robots that has to visit task locations in space, their order of visits can be optimized, which results in saved fuel. Doing this in a decentralized way allows us to also do task allocation without the need of a central serve. By looking at optimal solutions, we can have a sense of what good solutions look like, and deduce heuristics for individual robots. Initially, we'd start with a single depot location where the robots should start and finish.
Type: Directed Research for 3 credits (with Thesis Option)
Thesis Option: Add multiple recharging depot locations and/or mobile depots to the above problem. Analyze and improve the optimality gap.
Proposed By: Arsalan Akhter
Expected Results for an A: Robot Simulation of deduced heuristics, which result in a solution within 25% of the optimal solutions.
Expected Background/Coursework: Good with any programming language, (preferably Python/Java/C++)

Reinforcement Learning for Routing in Multi-Robot Systems
Abstract: For a team of robots that has to visit task locations in space, their order of visits can be optimized to save fuel. Reinforcement Learning can be employed to find heuristics that generalize to different scenarios.
Type: Directed Research for 3 credits (with Thesis Option)
Thesis Option: Add stochasticity to the paths that the robots have to travel (i.e. the robot can break-down or get slowed down). Also add time-windows to task visits.
Proposed By: Arsalan Akhter
Expected Results for an A: Robot Simulation (Preferably ARGoS) implementation of the paper "Attention: Learn to solve Routing Problems" by Walter Kool et al.
Expected Background/Coursework: Good with programming languages. Some exposure to Deep Learning and/or Reinforcement Learning.
Software Engineering and Design Approaches
Library of Swarm Behaviors
Abstract: Develop a Buzz/C++ library for all the possible simple swarm behaviors
Type: Directed Research for 3 credits
Proposed By: Carlo Pinciroli
Expected Results for an A: Implementation of suggested behaviors.
Expected Background/Coursework: Good programming
Robot/Hardware Design and Simulation
Drone Design for Mobile Swarm for Situational Awareness
Abstract: Design and prototype small (3”-5” Diameter) Quadcopter or equivalent with accessible wireless charging. Design and prototype wireless charging docking station.
Type: Major Qualifying Project (MQP)
Proposed By: Joshua Bloom (jdbloom@wpi.edu)
Expected Results for an A: Present a working prototype drone with docking station. Demonstrate successful launch and capture with docking station.
Expected Background/Coursework: The team will be expected to have members knowledgeable in mechanical design, electrical design, and control theory.
Drone Inversion Control (Simulation)
Abstract: Design a Control Sequence to attach a drone to a vertical surface at a specified position.
Type: Directed Research (DR)
Proposed By: Joshua Bloom (jdbloom@wpi.edu)
Expected Results for an A: Simulation showing the control sequence in action.
Expected Background/Coursework: The expected background for this project is in controls. The candidate must have a strong interest in control theory and drone control. Experience in drone control is not necessary.
Modular Beacon
Abstract: The motivation is to bring beacons into the physical world to represent tasks. There can be two types of tasks. 1)Stationary (i.e.: go there and do that), 2) Delivery (i.e.: bring this over here). Requires different objects, but same communication. Design requires RGB Lighting for identification, Bluetooth and/or Wifi communication, Small and modular. Preliminary Design may be based on the ESP32 microcontroller, requires RGB LEDs, power hardware (batteries, charger, regulator, etc), 3D printed chassis, Neodymium magnets, distance sensor (IR most likely).
Type: Directed Research for 3 credits
Proposed By: Stephen Powers
Expected Results for an A:
Expected Background/Coursework:
/* Commented because Jayam has graduated; potential 'sponsors' are welcomed
Modeling Trust in a Multi-Human Multi-Robot Interaction
Abstract: Trust model for determining Human Performance or other metrics (lying humans). Maybe use learning to build the trust over time. Robots take command from the more trusted humans when there is conflict in control (control of same entity)
Type: Directed Research for 3 credits (with Thesis Option)
Thesis Option:
Proposed By: Jayam Patel
Expected Results for an A: Formulation of the problem with implementation to record and analyze trust.
Expected Background/Coursework: Good programming and intro to ARGoS
“Eagle Vision” for the Swarm Environment
Abstract: Quadcopter/s or drone/s to monitor the field. Patch the video stream with the AR Application for remote control of the entities. Compare human performance while they are in the field vs remotely controlling the entities.
Type: Directed Research for 3 credits (with Thesis Option)
Proposed By: Jayam Patel
Expected Results for an A: 3-4 Quadcopters should fly in a pattern while sticking their collective vision and forwarding to the computer for processing.
Expected Background/Coursework: Programming Skills and an into to ARGoS

Human-Swarm Interaction for Education
Abstract: Develop an interface similar to scratch on a tablet, using simple swarm behaviors.
Type: Directed Research for 3 credits (with Thesis Option)
Proposed By: Jayam Patel
Expected Results for an A: Complete tablet application and code generation package to develop swarm behaviors on the go.
Expected Background/Coursework: Programming, Unity and intro to ARGoS

Interfaces for Human-Swarm Interaction
Abstract: Develop Virtual Reality (VR) application (similar to the AR implementation) to visualize and use Leap Motion to control the entities in the VR environment. Develop Point and Click (on a computer) application to interact with the entities in the ARGoS environment. Compare the intuitiveness, responsiveness, usability and immersiveness between all the three kinds of devices (AR v/s VR v/s Point and Click)
Type: Directed Research for 3 credits (with Thesis Option)
Proposed By: Jayam Patel
Expected Results for an A: Complete both the type of interfaces for a full grade
Expected Background/Coursework: Good Programming


*/
/* Commented because Nathalie has graduated; potential 'sponsors' are welcomed
ARGoS-Tensorflow Framework
Abstract: Compile a list of requirements for the framework by talking to lab members. Design an architecture based on the requirements. Implement the software infrastructure and document it.
Type: Directed Research for 3 credits (with Thesis Option)
Thesis Option: Make this framework open-source and/or develop machine learning applications
Proposed By: Nathalie Majcherczyk
Expected Results for an A: Working pipeline with a very simple example running.
Expected Background/Coursework: Machine Learning

Example framework from the 7th PLOW challenge (https://framagit.org/snippets/587)
Implementation of existing distributed data structures
Abstract: Create an API for our data structure SwarmMesh. Implement competing paper in the same set-up and generate comparison data.
Type: Directed Research for 3 credits
Proposed By: Nathalie Majcherczyk
Expected Results for an A: Comparison data to be included in a scientific paper.
Expected Background/Coursework: C\+\+ and python programming, software engineering.

*/