This is an old revision of the document!
Publications
Software Engineering and Design Approaches
SwarmMesh: A Distributed Data Structure for Cooperative Multi-Robot Applications
Nathalie Majcherczyk, Carlo Pinciroli. SwarmMesh: A Distributed Data Structure for Cooperative Multi-Robot Applications. 2020 IEEE International Conference on Robotics Automation (ICRA 2020). In press.
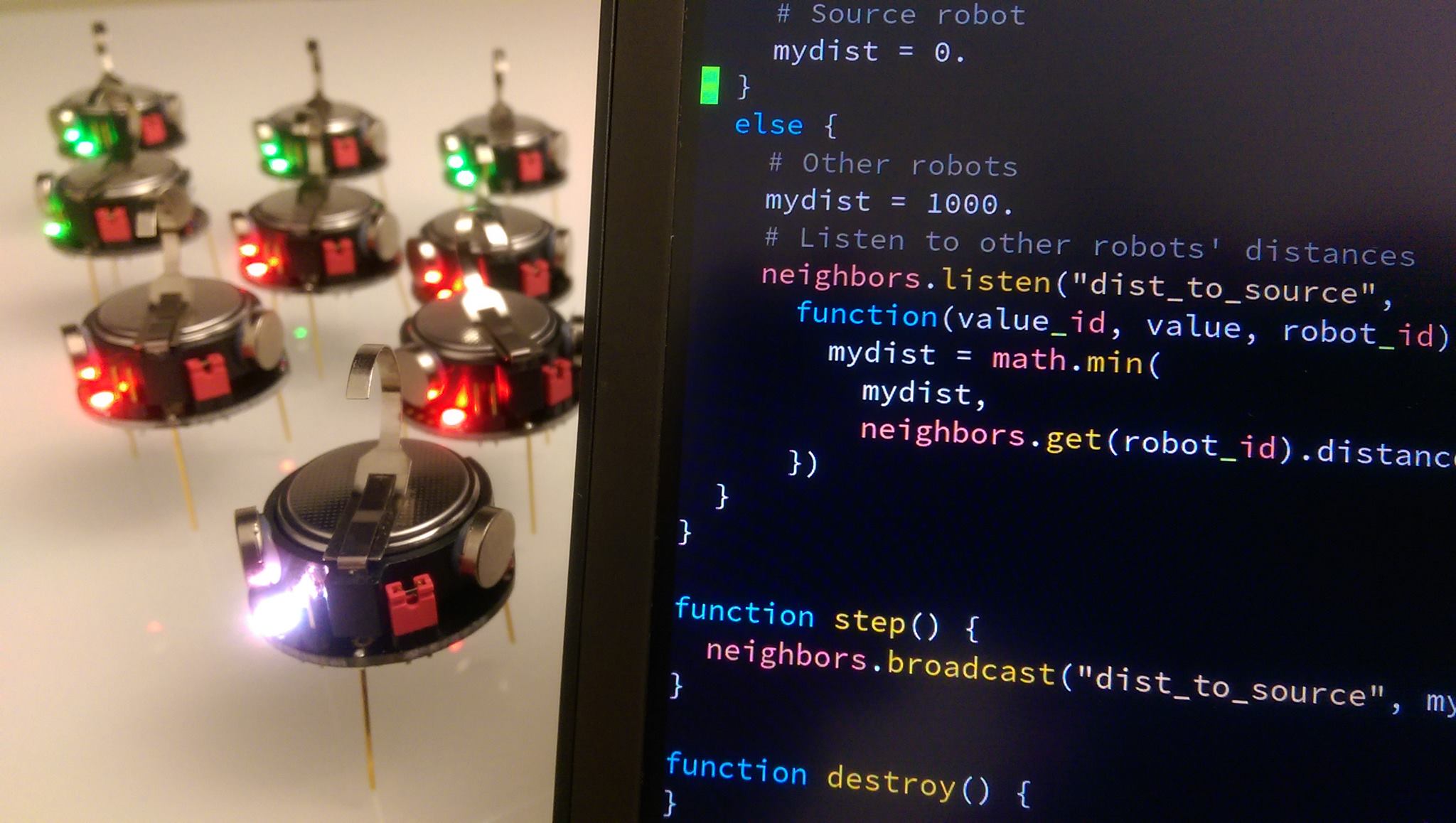
Buzz: A Programming Language for Robot Swarms
- Carlo Pinciroli and Giovanni Beltrame. Buzz: A Programming Language for Robot Swarms. IEEE Software, volume 33, number 4, pages 97-100. IEEE Press. 2016.
- Carlo Pinciroli, Giovanni Beltrame. Buzz: An Extensible Programming Language for Heterogeneous Swarm Robotics. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2016), pages 3794-3800. IEEE Press.

Engineering Safety in Swarm Robotics
Giovanni Beltrame, Ettore Merlo, Jacopo Panerati, Carlo Pinciroli. Engineering Safety in Swarm Robotics. 1st International Workshop on Robotics Software Engineering (RoSE 2018). IEEE Press.

Swarm-Oriented Programming of Distributed Robot Networks
Carlo Pinciroli, Giovanni Beltrame. Swarm-Oriented Programming of Distributed Robot Networks. IEEE Computer, volume 49, number 12, pages 32-41. IEEE Press. 2016.
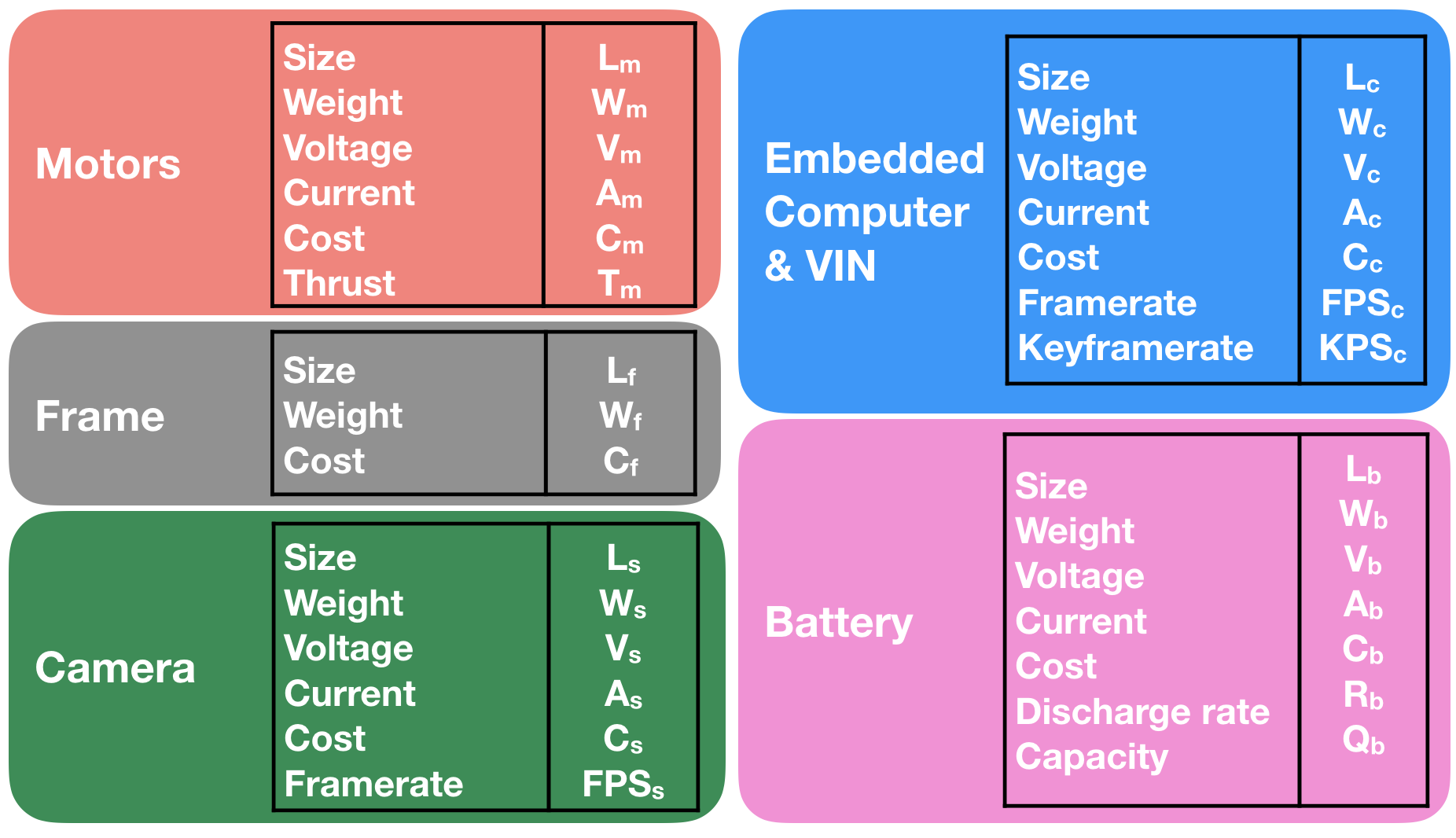
General Robot Co-design: Beyond the Monotone Case
Luca Carlone, Carlo Pinciroli. General Robot Co-design: Beyond the Monotone Case. International Conference on Robotics Automation (ICRA 2019). IEEE Press.
Human-Swarm Interaction
Improving Human Performance Using Mixed Granularity of Control in Multi-Human Multi-Robot Interaction
Jayam Patel, Carlo Pinciroli. Improving Human Performance Using Mixed Granularity of Control in Multi-Human Multi-Robot Interaction. IEEE International Conference on Robot and Human Interactive Communication (Ro-Man 2020). IEEE press.
Mixed-Granularity Human-Swarm Interaction
Jayam Patel, Xu Yicong, Carlo Pinciroli. Mixed-Granularity Human-Swarm Interaction. 2019 IEEE International Conference on Robotics Automation (ICRA 2019). IEEE press.
Connectivity Maintenance, Deployment, Shape Formation
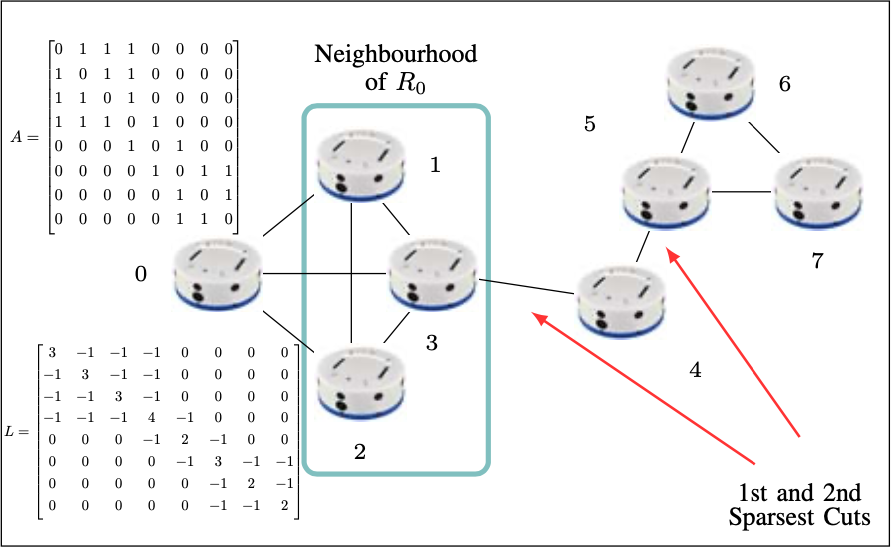
Decentralized Connectivity-Preserving Deployment of Large-Scale Robot Swarms
Nathalie Majcherczyk, Adhavan Jayabalan, Giovanni Beltrame, Carlo Pinciroli. Decentralized Connectivity-Preserving Deployment of Large-Scale Robot Swarms. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2018). IEEE press.
From Swarms to Stars: Task Coverage in Robot Swarms with Connectivity Constraints
Jacopo Panerati, Luca Gianoli, Carlo Pinciroli, Abdo Shabah, Gabriela Nicolescu, Giovanni Beltrame. From Swarms to Stars: Task Coverage in Robot Swarms with Connectivity Constraints. 2018 IEEE International Conference on Robotics and Automation (ICRA 2018). IEEE press.
Decentralized Progressive Shape Formation with Robot Swarms
- Guannan Li, David St-Onge, Carlo Pinciroli, Andrea Gasparri, Emanuele Garone, Giovanni Beltrame. Decentralized Progressive Shape Formation with Robot Swarms. Autonomous Robots, volume 42, number 8, pages 1-17. Springer. 2017.
- Carlo Pinciroli, Andrea Gasparri, Emanuele Garone, Giovanni Beltrame. Decentralized Progressive Shape Formation with Robot Swarms. 13th International Symposium on Distributed Autonomous Robotic Systems 2016 (DARS 2016), pages 433-445. Springer.
Minimalistic Computation
A Minimalistic Approach to Segregation in Robot Swarms
Peter Mitrano, Jordan Burklund, Michael Giancola, Carlo Pinciroli. A Minimalistic Approach to Segregation in Robot Swarms 2nd International Symposium on Multi-Robot and Multi-Agent Systems (MRS 2019). Springer.
Circle Formation with Computation-Free Robots Shows Emergent Behavioral Structure
David St-Onge, Carlo Pinciroli, Giovanni Beltrame. Circle Formation with Computation-Free Robots Shows Emergent Behavioral Structure. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2018). IEEE press.
Consensus and Decision-Making
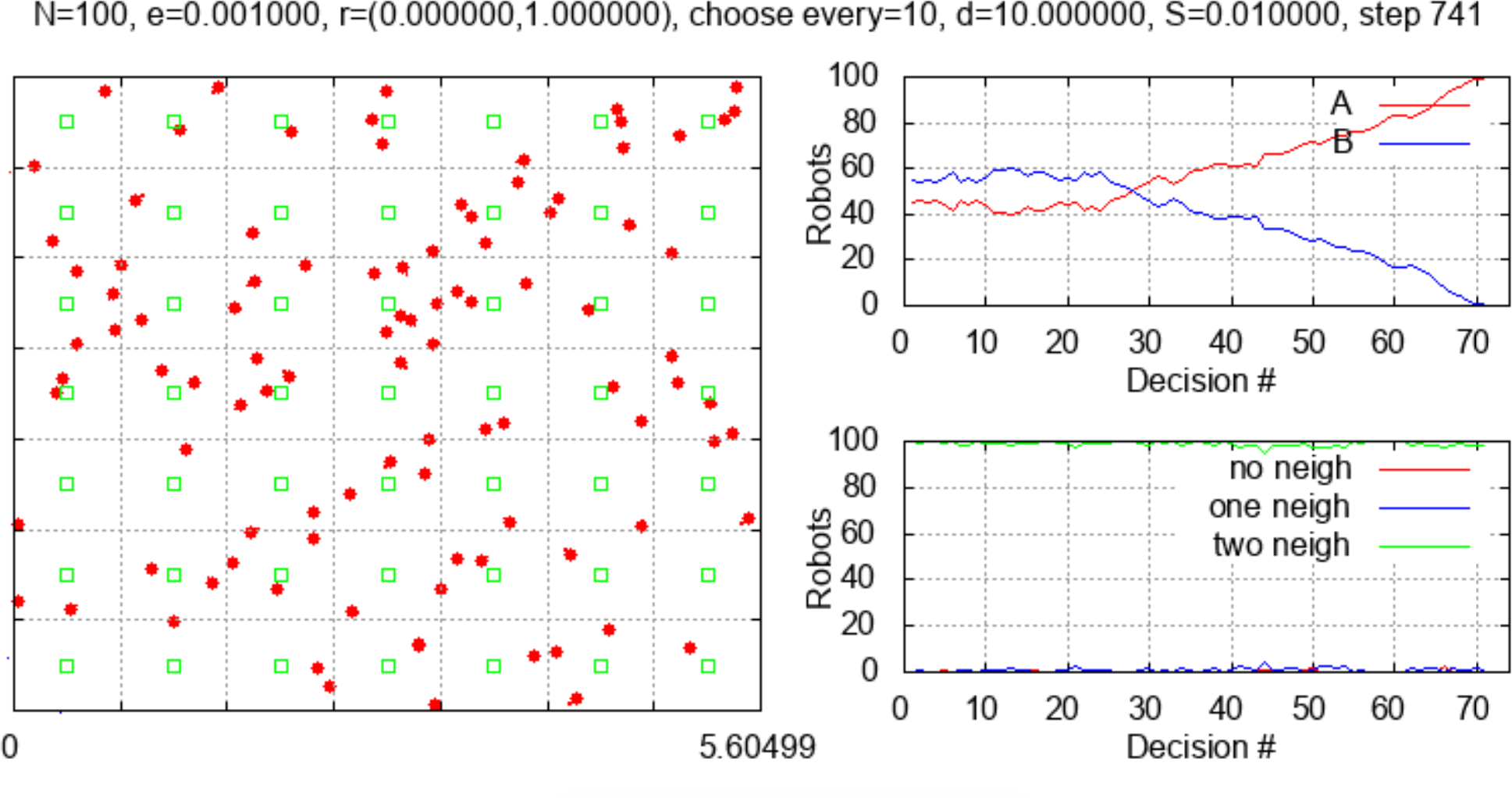
The Impact of Agent Density on Scalability in Collective Systems: Noise-Induced vs Majority-Based Bistability
Yara Khaluf, Carlo Pinciroli, Gabriele Valentini, Heiko Hamann. The Impact of Agent Density on Scalability in Collective Systems: Noise-Induced vs Majority-Based Bistability. Swarm Intelligence, volume 11, pages 155-179. Springer. 2016.
Simulation
Simulating Kilobots within ARGoS: Models and Experimental Validation
Carlo Pinciroli, Mohamed Salaheddine Talamali, Andreagiovanni Reina, James A. R. Marshall, Vito Trianni. Simulating Kilobots within ARGoS: Models and Experimental Validation. 11th International Conference on Swarm Intelligence (ANTS 2018). Springer.
Simulating Multi-Robot Construction in ARGoS
Michael Allwright, Carlo Pinciroli, Navneet Bhalla, Marco Dorigo. Simulating Multi-Robot Construction in ARGoS. 11th International Conference on Swarm Intelligence (ANTS 2018). Springer.
Teaching
A Gamification Concept for Teaching Swarm Robotics
Heiko Hamann, Carlo Pinciroli, Sebastian von Mammen. A Gamification Concept for Teaching Swarm Robotics. 12th European Workshop on Microelectronics Education (EWME 2018). IEEE press.
Undergraduate Projects
WPI Major Qualifying Projects (Selected)
Oddisy Drone Dispatch System
Students: Noah Hillman, Nick Sorensen, Marek Travnikar, Steven Viola
Advisors: Nick Bertozzi, Reinhold Ludwig, Brad Miller, Carlo Pinciroli
3D Swarm Construction
Students: Cameron Collins, Josue Contreras, Neel Dhanaraj, Hannan Liang, Trevor Rizzo, Caleb Wagner
Advisors: Carlo Pinciroli, Gregory Lewin, Raghvendra Cowlagi, Xinming Huang